MotorGo Plink
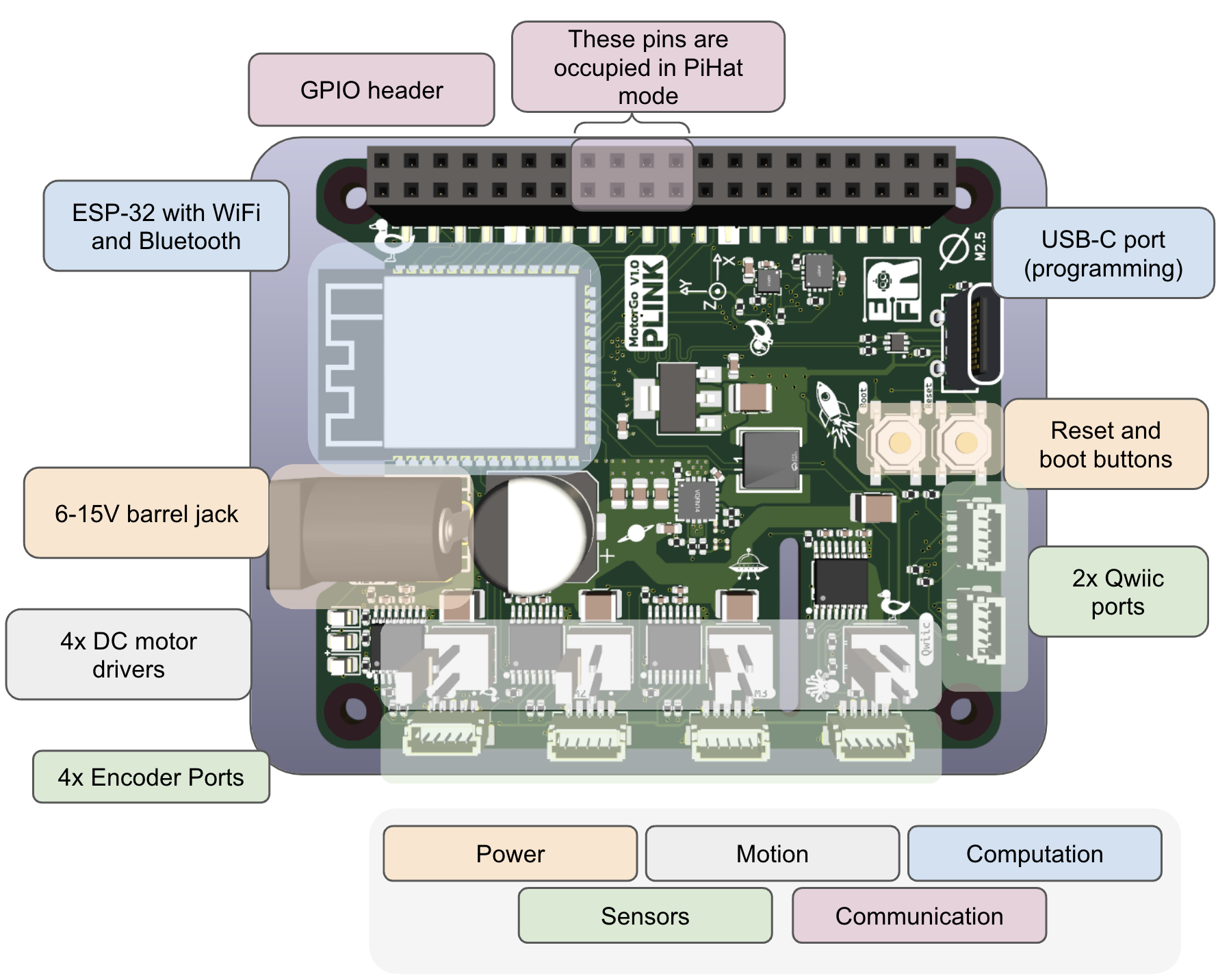
Key Features
- 6–15V Barrel Jack – ⚠️ Center-positive!
- 4x DC Motor Drivers – Supports up to 1.5A per channel.
- 4x Encoder Ports – Plug-and-play compatibility with EncoderGo.
- 9-DOF IMU – LSM6DSO accelerometer and LIS3MDL magnetometer.
- 2x Qwiic Ports – 4-pin I2C connectors for sensors and peripherals.
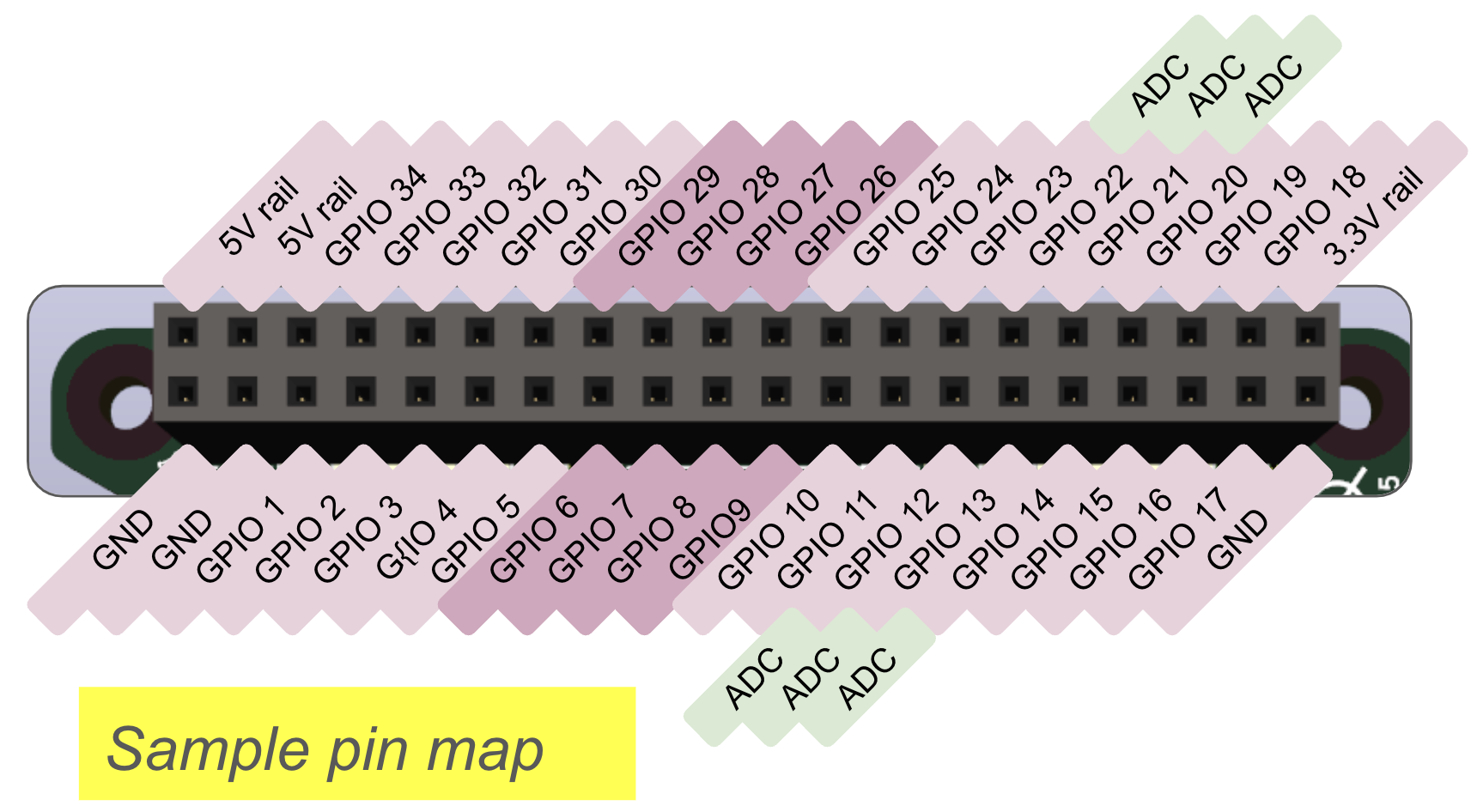
- GPIO Header – Refer to the pin diagram below for details.
- USB-C Port – Program Plink over a USB-C connection.
For additional details about the Plink hardware, visit our GitHub Repository.
Board Layout
Pin Diagram
⚠️
This pin diagram is a work in progress. Please check back soon for updates.
Setup
The MotorGo Plink supports two modes to fit your project needs. In Standalone Mode, it acts as the main controller, requiring no additional compute hardware. In PiHat Mode, it offloads motor control to the Plink while a Raspberry Pi handles the rest of the high-level processing to provide more flexibility.